Rationale
Automotive industry as a whole is changing fast due to modern times: electrical vehicle, autonomous driving, ADAS, conenectivity, etc.
Also, everthing around our every day lives is changing: the Internet of Things (IoT), Industry 4.0, big data, machine learning.
In general, we are building smarter and smarter machines everyday. Everything is connected to the Internet and appears to be intelligent.
The same happens to the cars. And this requires flexible vehicle architectures and powerful ECUs in terms of computing power.
These powerful ECUs need to exchange tons of information. And the best way to do so is through Ethernet starting at 100Mbps (and 1Gbps coming soon).
Powerful ECUs mean more costs in an industry in which efficiency is a religion. And not every carline will come with the top notch functionality: there is still room for cost effective cars not in the premium segment.
So, vehicle architectures need to be flexible. Reutilize as much as possible between carlines but at the same time wasting the less resources.
Therefore, having a smart and flexible way to deploy functionalities inside a vehicle architecture looks like a great idea. And this is what Service Discovery provides: the funcionalities inside the vehicle architecture are deployed as services in ECUs which provide them. Then we have the consumers or clients, other ECUs which look for these services they need and they try to find them in the network.

Adaptive AUTOSAR and Classic AUTOSAR
AUTOSAR software architecture, now it its 4.3 version, is renamed to “Classic” AUTOSAR. A new software architecture emerges: Adaptive AUTOSAR. Why?
New powerful ECUs are built with application microprocessors instead of microcontrollers. The complexity of the new applications require complex Operating Systems and software frameworks including Linux, Android and Hypervisors, among others. This is why the AUTOSAR consortium has developed the new software architecture, based in POSIX standards.
Matching all together. SomeIP to exchange data
With the new vehicle architectures, where Classic AUTOSAR and Adaptive AUTOSAR cohexist, and with tons of data to be exchanged, Ethernet is the predominant bus.
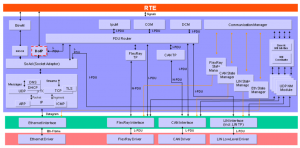
The protocol for exchanging data is SomeIP, which is just a serialization of data signals coming from the RTE into UDP PDUs. Serialization is done in the RTE, then data is transmited in BSW from LdCom to PDU Router, and then from Socket Adaptor to the TCP/IP stack.
What happens when the data to be transmited is too big for a single UDP packet (remember UDP payload up to 1472)? SomeIP TP (Transport Protocol) is added for this purpose.
The whole picture can be seen in the following image:

Stay tuned for new blog entries and remember that the Python libraries for testing purposes of DoIP and SomeIP / Service Discovery are coming soon to the download area.
Any doubts, you can write a comment.
Contact: guru@autoethernet.com
Your AUTOSAR partner.